Scansione di superfici di parti complesse con la Laser Line Probe (LLP) o lo ScanArm

Panoramica
Si ottengono risultati coerenti e di alta qualità e si è più efficienti, quando si adottano le migliori pratiche per la scansione di superfici di parti complesse con la Laser Line Probe (LLP) o FARO ScanArm. Prima di iniziare il progetto, rivedere il video e l' elenco qui sotto per indicazioni collaudate che permettono di eseguire una scansione senza contatto a prova di errori.
Video
In questo video, mostriamo come applicare le migliori pratiche. Facendo attenzione a come l’operatore gestisce la LLP e a come posiziona il corpo per ottenere i risultati più accurati.
Migliori pratiche
- Angolare la LLP correttamente a seconda del tipo di superficie che si sta sottoponendo a scansione.
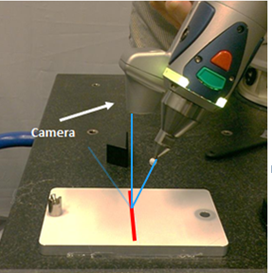
- Per le superfici non riflettenti od opache, l'angolo del raggio laser deve essere perpendicolare alla superficie del pezzo. Questo permette alla telecamera di ottenere il massimo ritorno dal laser

- Per le superfici riflettenti, l'angolo del raggio laser deve essere ad angolo rispetto alla superficie della parte. Ottenere l'angolo ottimale allineando la telecamera perpendicolarmente alla superficie del pezzo. Questo assicura che i riflessi del rumore siano distolti dalla telecamera
- Per le superfici non riflettenti od opache, l'angolo del raggio laser deve essere perpendicolare alla superficie del pezzo. Questo permette alla telecamera di ottenere il massimo ritorno dal laser
- Quando si calibra il V3 o l'ES LLP, iniziare con l'algoritmo Normal (Normale), poi regolare le impostazioni Advanced (Avanzate) per adattarle alla finitura della superficie.
- L'impostazione Normal (Normale) è buona per superfici opache non troppo scure. L'esposizione si regola automaticamente entro un intervallo compreso tra 0 e 50.
- Full (Completa) è l’opzione indicata per le superfici opache più scure. L'esposizione si regola automaticamente entro un intervallo compreso tra 0 e il massimo.
- Highly Reflective (Altamente riflettente) è l’opzione indicata per le superfici riflettenti. L'esposizione si regola automaticamente entro un intervallo compreso tra 0 e il massimo e regola anche altre impostazioni per gestire meglio la brillantezza.
- Quando si calibra l'HD LLP, iniziare con l'algoritmo Automatic-Normal (Automatico-Normale), poi regolare le impostazioni e i filtri in modo che corrispondano alla finitura della superficie.
- Il Reflection Filter (filtro del riflesso) rimuove il rumore dei dati creato dalle superfici lucide.
- L'algoritmo Automatico-HDR normalizza le aree con alti contrasti tra aree scure e chiare
-
Eseguire la scansione con Esposizione fissa se le condizioni di illuminazione dell'ambiente influiscono in modo significativo sulla qualità della scansione. La scansione con Esposizione fissa invece che con “Normale” garantisce la coerenza della qualità dei dati se l'illuminazione esterna disturba il sensore della fotocamera. L'utente può iniziare con 400 ms e regolare l'esposizione in base alla luminosità/scurità della superficie del pezzo.
-
Tenere la LLP a una distanza costante dalle superfici del pezzo mentre la si sposta sul pezzo per ridurre il rumore. La LLP ha una densità di punti maggiore nel campo vicino, quando si tiene la LLP vicino, rispetto al campo lontano, quando si tiene la LLP più lontano. L'aumento del rumore nel campo lontano è legato alla distanza che il raggio laser percorre per raggiungere la superficie e tornare alla telecamera. Quando il raggio laser viaggia più lontano, il segnale di ritorno non è ben definito come quando è vicino. È simile al raggio di una torcia elettrica. Quando si punta il fascio sul campo vicino, la luce sembra più brillante e i bordi del fascio sono più definiti. Quando si punta il fascio più lontano, la luce sembra meno brillante e i bordi del fascio sono più sfumati.
- Impostare la modalità di precisione su High (Alta) nella finestra di dialogo delle impostazioni. Questa impostazione esclude i punti più lontani dallo scanner nel campo lontano. Mentre questo riduce la profondità di campo da circa 4,5 pollici (115 mm) a 1,25 pollici (32 mm), i test su superfici calibrate con una finitura opaca mostrano che il rumore di scansione è ridotto del 50% circa. L'impostazione della modalità High Accuracy (Alta Precisione) per V1, V2, V3 ed ES può migliorare la precisione, ma per il modello HD diminuirà solo il rumore in modo significativo.
- Tenere ferma la maniglia mentre si sposta la LLP sulle superfici dei pezzi. Evitare di ruotarla.
- Avvicinare le superfici delle parti alla LLP invece di allontanarle.
- Quando si esegue la scansione di superfici che si incontrano formando un angolo, procedere prima su una, poi su quella attigua. Prima posizionare la LLP perpendicolarmente a una superficie, eseguire la scansione completa, poi fermarsi. Riposizionare quindi la LLP perpendicolare alla superficie adiacente, eseguire la scansione completa e fermarsi. Non spostare la LLP come per rotolarla sull'angolo delle due superfici adiacenti.
- Non andare troppo oltre con la scansione. Posizionare il corpo, le braccia e le mani, in modo tale che la sezione del pezzo da sottoporre a scansione si trovi alla propria portata, in posizione comoda rispetto al corpo.
- Suddividere il progetto di scansione in parti logiche che permettano di osservare le migliori pratiche durante la scansione.
Vedere anche
- Impostazioni di calibrazione per ottimizzare la qualità della Laser Line Probe (LLP)
- Spray in polvere antiriflesso raccomandato per l'uso con la Laser Line Probe
Parole chiave:
scansione di angoli, scansione di parti complesse, scansione di parti difficili, tenere la LLP, puntare la LLP, posizione normale per la LLP