Compensazione della Laser Line Probe (LLP) utilizzando il driver USB FaroArm 6.1.0 e successivi

Panoramica
Per assicurarsi che il progetto abbia i risultati di misurazione più accurati, compensare sempre (operazione detta anche calibrazione) la LLP prima di iniziare un progetto di misurazione.
Le versioni 6.0 e successive del driver FaroArm includono il FaroArm Manager che consente di compensare il dispositivo dopo averlo collegato a un PC con il driver installato.
- Fare clic qui per controllare il numero di versione del driver installato sul PC. Se il numero di versione è 6.1.0 o successivo, seguire queste istruzioni. In caso contrario, fare clic qui per le istruzioni precedenti.
- Scaricare l'ultimo manuale FaroArm per ulteriori istruzioni sulla compensazione.
Fare riferimento al video qui sotto per le semplici istruzioni per la compensazione.
Video
Questo video mostra la procedura di routine completa per compensare la FARO Laser Line Probe (LLP).
Suggerimenti
Osservare questi punti salienti nel guardare la dimostrazione video.
- Prima di usare la piastra di calibrazione/compensazione, assicurarsi che il lato inferiore della piastra e la superficie su cui verrà posizionata siano puliti e privi di qualsiasi detrito. La specifica di planarità per la superficie bianca della piastra è di 0,001" (0,0254mm). Questa dimensione non è una specifica tracciabile e non è verificata durante il processo di certificazione.
- L'operatore esegue una serie di 5 corse che coprono 4 posizioni della piastra di compensazione allontanando e avvicinando l'LLP alla piastra.
- Nell’orientare ed eseguire ogni corsa, osservare gli indicatori sulla destra del pannello di compensazione del software FaroArm Manager (vedi la sezione Passaggi qui sotto per i dettagli). L'operatore mantiene il più possibile tutti gli indicatori nell’intervallo di colore verde.
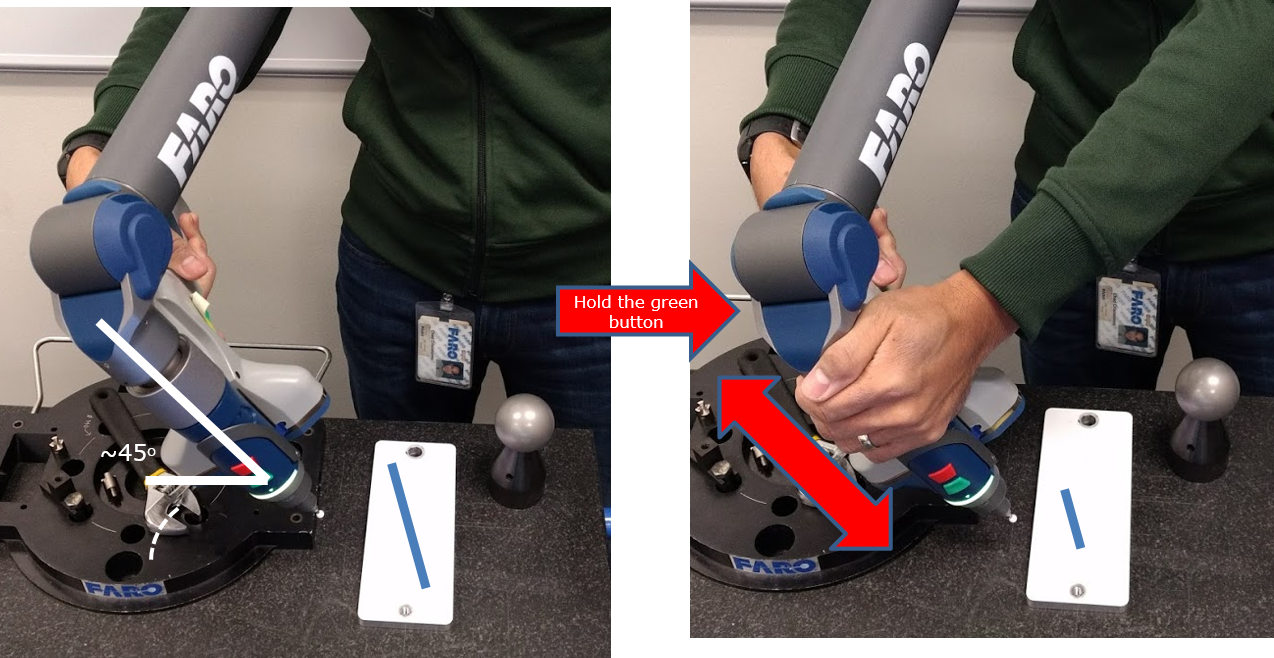
- L'indicatore circolare Radar valuta l'orientamento e l'angolo della LLP rispetto alla piastra. Cercare di mantenere l'angolo a circa 45°. Il verde significa che la LLP è angolata e orientata correttamente. Altri colori significano che l'operatore deve correggere l'angolo o l'orientamento della LLP.
- L'indicatore Probe Twist (Rotazione sonda) valuta se l'impugnatura della LLP sta ruotando durante la corsa. Il verde significa che non sta ruotando. Altri colori significano che l'operatore deve tenere ferma l’impugnatura.
- L'indicatore Trapezoid (Trapezio) valuta la copertura e la completezza della corsa. Finché gli indicatori Radar e Rotazione sonda sono verdi, l'operatore può riempire completamente il trapezio con le barre verdi dal basso verso l'alto. Questo significa che le corse sono corrette. Altri colori significano che l'operatore deve regolare l'angolo di corsa e la rotazione, così come la copertura della piastra. Per coprire la piastra, l'operatore deve mantenere la linea del laser sulla piastra mentre esegue la corsa.
- Non è importante che le corse dell'operatore inizino lontano dalla piastra o vicino, purché tutti gli indicatori siano verdi e l'indicatore Trapezio sia completamente pieno.
- Mentre l'operatore esegue la corsa da lontano a vicino, o viceversa, mantiene il raggio laser LLP stabile e sulla piastra.
- Per ottenere i risultati migliori, l'operatore mantiene il punto nero sull'indicatore Radar più vicino possibile al centro.
Passaggi
Fare riferimento al video qui sopra per la procedura di compensazione nel seguire i vari passaggi. Scaricare l'ultimo manuale FaroArm e ulteriori informazioni sulla compensazione.
Configurazione della compensazione
- Posizionare la piastra di compensazione nel senso della lunghezza sulla superficie del tavolo di lavoro e stare dietro il tavolo nella posizione 1, come mostrato in questa immagine.
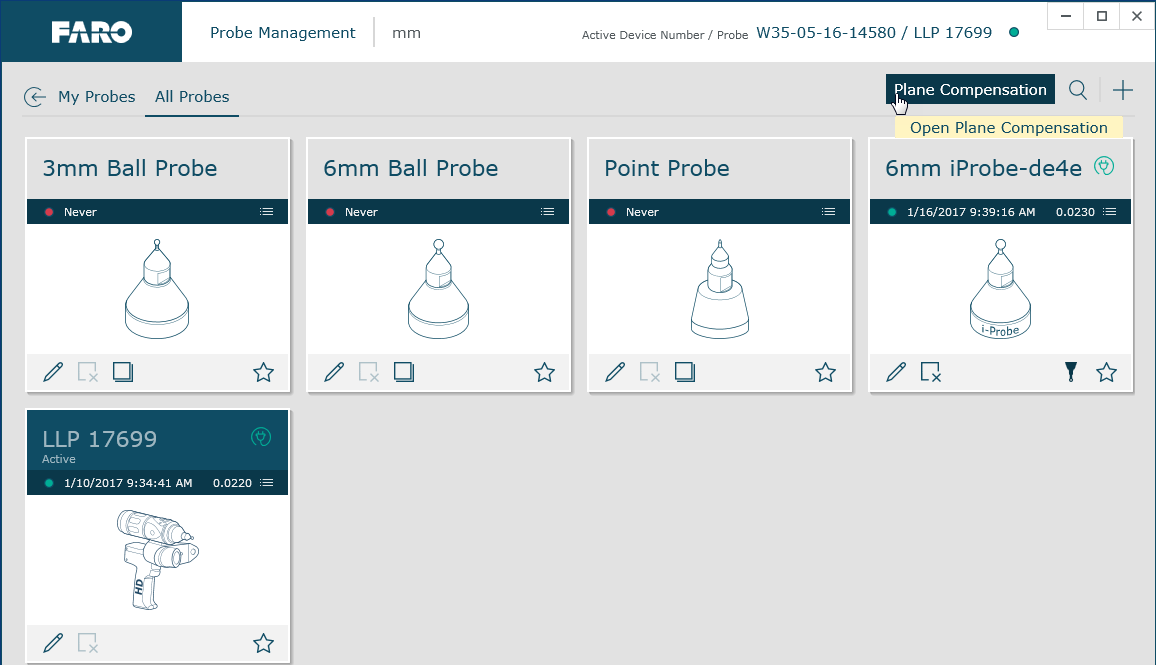
- Accendere il FaroArm e collegarlo a un computer dotato del driver FaroArm versione 6.1 o successiva. Dal menu Avvio di Windows fare clic su FARO > FaroArm Manager > Probe Management (Gestione sonda). Si apre il pannello Probe Management (Gestione sonda).
- Fare clic sul tipo di sonda rigida collegata al FaroArm e compensare la sonda rigida utilizzando il metodo Hole Compensation (Compensazione foro). Se si ha bisogno di istruzioni, scaricare l'ultimo Manuale FaroArm e nel campo Cerca digitare Probe Management (Gestione sonda).
- Una volta compensata la sonda rigida, nel pannello Probe Management (Gestione sonda), fare clic su Laser Line Probe per attivarla. Poi, nell'angolo in alto a destra, fare clic su Plane Compensation (Compensazione piano). Si apre il pannello Overview Compensation (Panoramica compensazione).
- Fare quindi clic su Measure Plane (Misura piano) per misurare la piastra di compensazione come un piano, usando almeno 8 punti. Se si ha bisogno di istruzioni, scaricare l'ultimo Manuale FaroArm e nel campo Cerca digitare Laser Line Probe Compensation (Compensazione Laser Line Probe). Quando appare l’indicazione della correttezza dell’operazione, fare clic su Start Compensation (Avvia compensazione). Si apre il pannello Compensation (Compensazione)
Compensazione
- Per coprire la posizione 1 sulla piastra, iniziare la corsa con la LLP orientata perpendicolarmente alla piastra e puntare le linee laser direttamente al centro della piastra. Nel pannello Compensation (Compensazione), l'indicatore Radar dovrebbe mostrare un punto nero al centro. In caso contrario, spostare la LLP fino al centraggio del punto.
- Inclinare la LLP a 45° verso di sé e tenere premuto il pulsante verde per raccogliere i dati. Allontanare e avvicinare la LLP alla piastra finché il trapezio non si riempie di barre verdi. Ricordare di guardare l'indicatore Radar nel pannello di compensazione mentre si sposta la LLP per mantenere il punto nero al centro e gli altri indicatori in verde. Mantenere sempre le linee del laser sulla piastra. Quando l'indicatore Trapezoid (Trapezio) è pieno, rilasciare il pulsante verde e procedere.
- Per coprire la posizione 2 e iniziare la corsa, riportare la LLP in perpendicolare, allineando il punto nero al centro del Radar e mantenendo tutti gli indicatori in verde. Inclinare la LLP di 45° a destra e tenere premuto il pulsante verde per raccogliere i dati. Allontanare e avvicinare la LLP alla piastra finché il trapezio non si riempie di barre verdi. Guardare l'indicatore Radar, tenere il punto nero al centro e tutti gli indicatori in verde. Quando il trapezio è pieno, rilasciare il pulsante verde e procedere.
- Per coprire la posizione 3 e iniziare la corsa, spostare la LLP verso il fondo della piastra. Riportare la LLP in posizione perpendicolare, allineando il punto nero al centro del Radar e mantenendo tutti gli indicatori verdi. Inclinare la LLP a 45° da sé e tenere premuto il pulsante verde per raccogliere i dati. Allontanare e avvicinare la LLP alla piastra finché il trapezio non si riempie di barre verdi. Guardare gli indicatori. Quando il trapezio è pieno, rilasciare il pulsante verde e procedere.
- Per coprire la posizione 4 e iniziare la corsa, riportare la LLP in perpendicolare, allineando il punto nero al centro del Radar e mantenendo tutti gli indicatori in verde. Inclinare la LLP di 45° a sinistra e tenere premuto il pulsante verde per raccogliere i dati. Allontanare e avvicinare la LLP alla piastra finché il trapezio non si riempie di barre verdi. Guardare gli indicatori. Quando il trapezio è pieno, rilasciare il pulsante verde e procedere.
- Per la quinta corsa finale, riportare la LLP in perpendicolare e puntare le linee laser direttamente al centro della piastra. L'indicatore Radar dovrebbe mostrare un punto nero al centro. Tenere premuto il pulsante verde. Allontanare e avvicinare la LLP alla piastra finché il trapezio non si riempie di barre verdi. Guardare gli indicatori. Quando il trapezio è pieno, rilasciare il pulsante verde e comparirà il risultato. La compensazione è terminata.
- Il FaroArm Manager calcola i punti di compensazione. Al termine si apre il pannello Results (Risultati), che mostra lo Status (Stato) di corretto completamento, così come le metriche di Error (Errore) e di Specification (Specifica). Fare clic su Save and Exit (Salva ed esci).
- La compensazione è terminata
Vedere anche
- Manuale dell’utente del FaroArm e ScanArm della serie Quantum
- Standard di compensazione, calibrazione e certificazione per i dispositivi FARO
Parole chiave:
scanarm, scanner, calibrare, calibrazione, calibrazione llp, calibrazione laser line probe, impostazioni llp, compensazione laser, compensare, compensazione